
Hongyi Jing’s Personal Website
About
I am a second-year CS master student at University of Southern California, working with Prof. Yue Wang at Physical Superintelligence(PSI) Lab. My research mainly focuses on Robotics, particularly whole-body humanoid control and dexterous manipulation. I aim to develop intelligent systems that enable humanoid robots to perform coordinated, dynamic, and physically interactive tasks in the real world.
Before this, I received my Bachelor’s degree at Huazhong University of Science and Technology, where I worked with Prof. Xiang Xiang. I also served as an research intern in MINE Lab led by Prof.Xiangliang Zhang at Notre Dame during my senior year.
I am open to research collaborations and industry internships. Please contact me if you’re interested!
Publications
-
 ArXiv
ArXiv - Ψ₀: An Open Foundation Model Towards Universal Humanoid Loco-Manipulation
- in arXiv preprint (* indicates equal contribution) , 2026
- Paper Code Website
Cite
@misc{wei2026psi0openfoundationmodel, title={$ si_0$: An Open Foundation Model Towards Universal Humanoid Loco-Manipulation}, author={Songlin Wei and Hongyi Jing and Boqian Li and Zhenyu Zhao and Jiageng Mao and Zhenhao Ni and Sicheng He and Jie Liu and Xiawei Liu and Kaidi Kang and Sheng Zang and Weiduo Yuan and Marco Pavone and Di Huang and Yue Wang}, year={2026}, eprint={2603.12263}, archivePrefix={arXiv}, primaryClass={cs.RO}, url={https://arxiv.org/abs/2603.12263}, }
-
 ArXiv
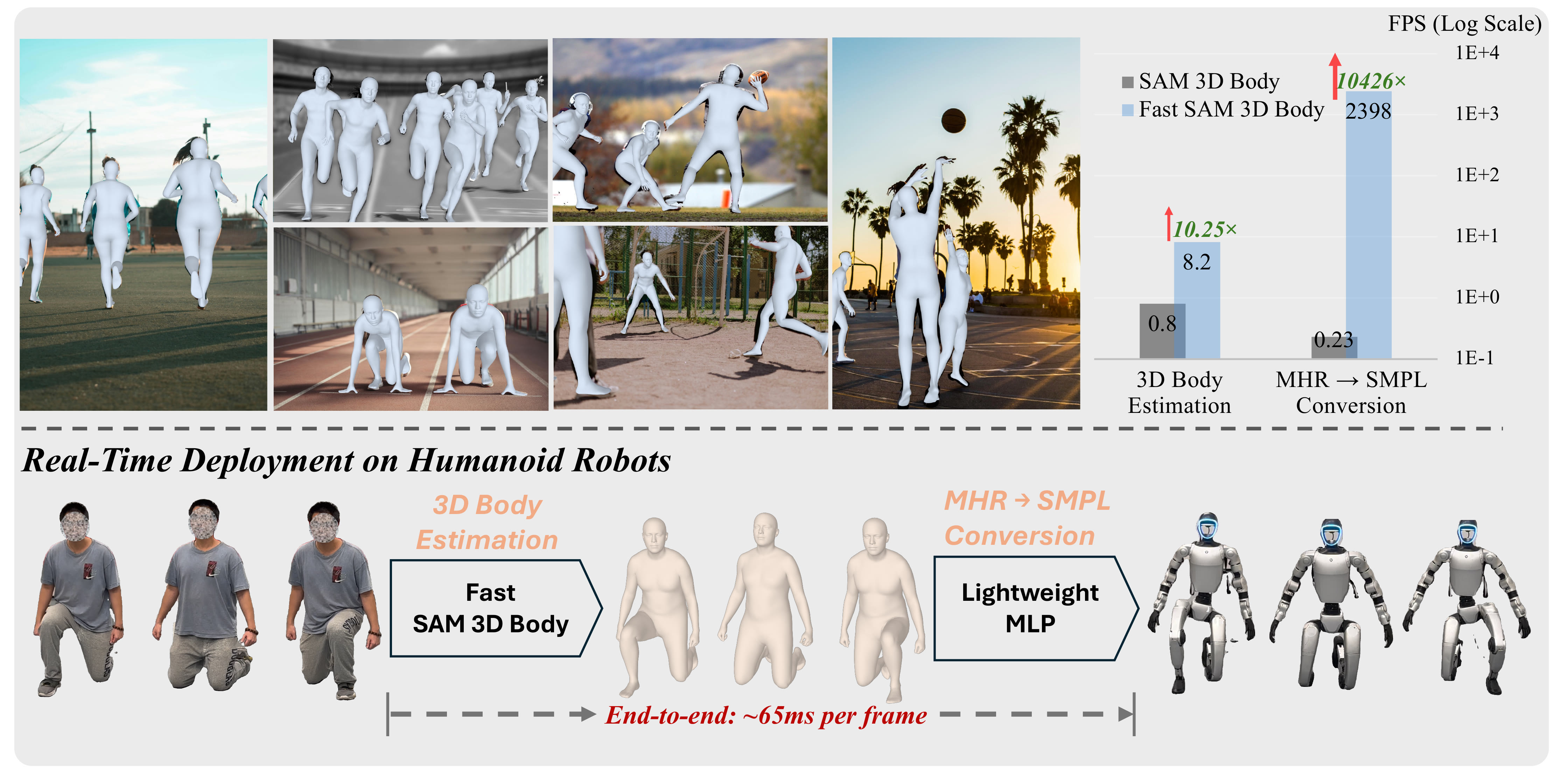
ArXiv - Fast SAM 3D Body: Accelerating SAM 3D Body for Real-Time Full-Body Human Mesh Recovery
- in arXiv preprint (* indicates equal contribution) , 2026
- Paper Code Website
Cite
@misc{yang2026fastsam3dbody, title={Fast SAM 3D Body: Accelerating SAM 3D Body for Real-Time Full-Body Human Mesh Recovery}, author={Timing Yang and Sicheng He and Hongyi Jing and Jiawei Yang and Zhijian Liu and Chuhang Zou and Yue Wang}, year={2026}, eprint={2603.15603}, archivePrefix={arXiv}, primaryClass={cs.CV}, url={https://arxiv.org/abs/2603.15603}, }
-
 ICRA 2026
ICRA 2026 - Humanoid Everyday: A Comprehensive Robotic Dataset for Open-World Humanoid Manipulation
- in arXiv preprint (* indicates equal contribution) , 2025
- Paper Code Website
Cite
@article{zhao2025humanoid, title={Humanoid Everyday: A Comprehensive Robotic Dataset for Open-World Humanoid Manipulation}, author={Zhao, Zhenyu and Jing, Hongyi and Liu, Xiawei and Mao, Jiageng and Jha, Abha and Yang, Hanwen and Xue, Rong and Zakharov, Sergey and Guizilini, Vitor and Wang, Yue}, journal={arXiv preprint arXiv:2510.08807}, year={2025} }
-
 MICCAI 2023
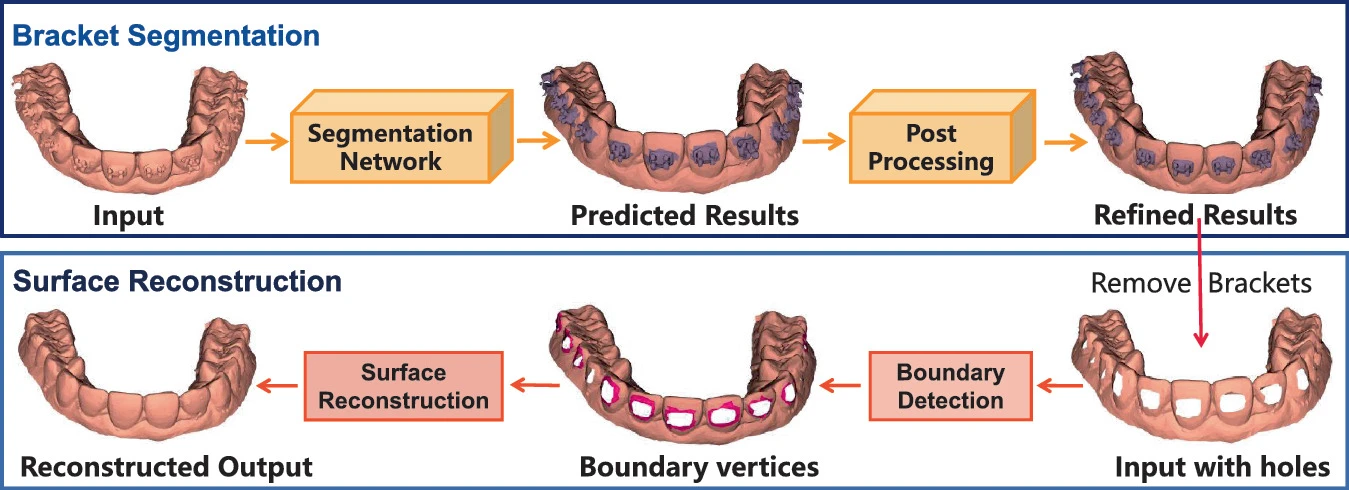
MICCAI 2023 - Coupling Bracket Segmentation and Tooth Surface Reconstruction on 3D Dental Models
- in Medical Image Computing and Computer-Assisted Intervention (MICCAI) , 2023
- Paper
Cite
@inproceedings{tan2023coupling, title={Coupling Bracket Segmentation and Tooth Surface Reconstruction on 3D Dental Models}, author={Tan, Yuwen and Xiang, Xiang and Chen, Yifeng and Jing, Hongyi and Ye, Shiyang and Xue, Chaoran and Xu, Hui}, booktitle={Medical Image Computing and Computer-Assisted Intervention -- MICCAI 2023}, series={Lecture Notes in Computer Science}, volume={14225}, pages={---}, year={2023}, publisher={Springer, Cham}, doi={10.1007/978-3-031-43987-2_40} }